Find Your Navigation Solution
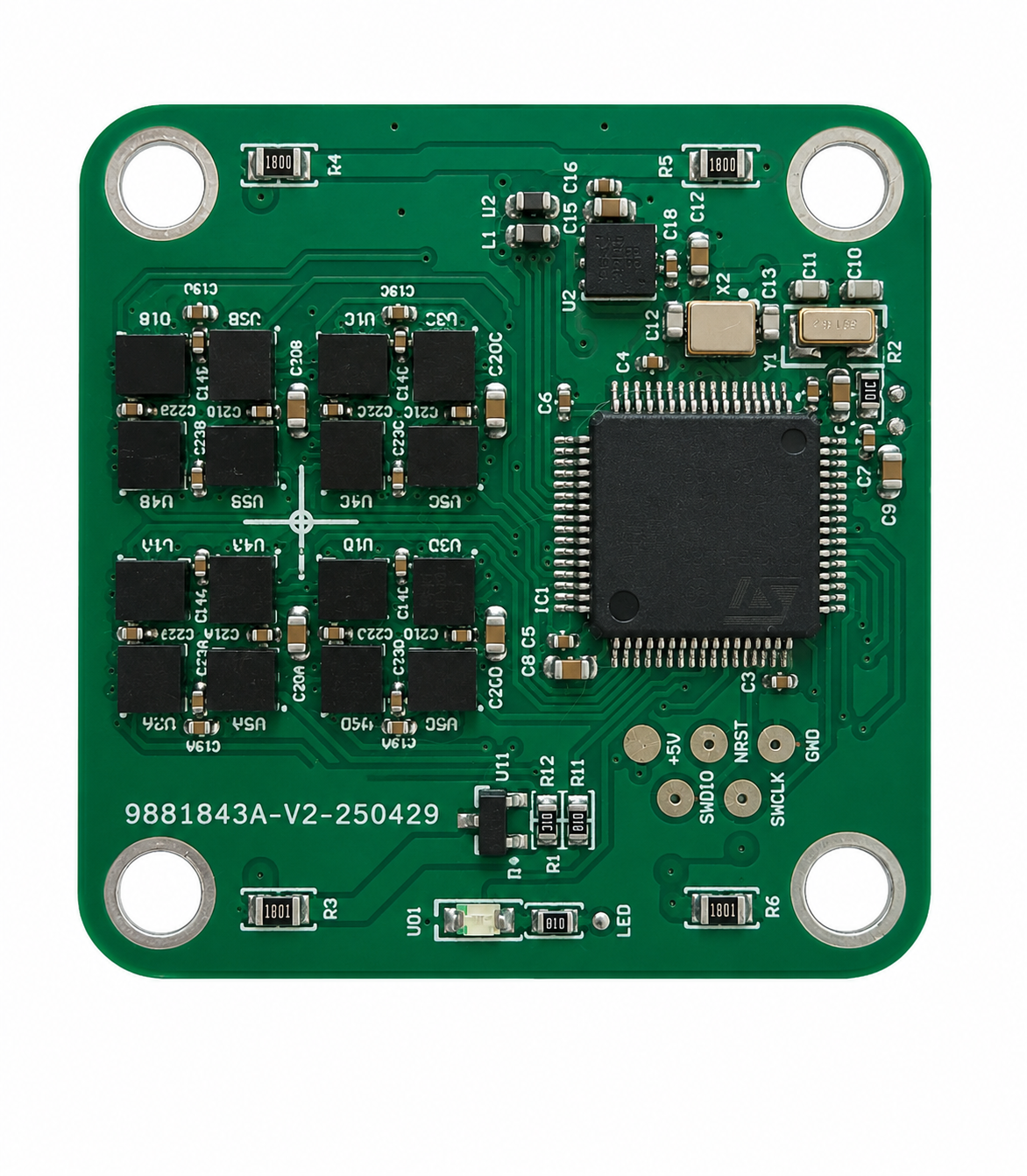
Parallel MEMS array fused through EKF-based AI logic. Designed for operations where GPS is unavailable, jammed, or spoofed. Integrates into existing flight stacks via UART, SPI, or CAN without hardware redesign.
IMS-AI integrates into ArduPilot as a custom AP_InertialSensor backend — the parallel MEMS array delivers a single fused 6-DOF stream that EKF3 consumes alongside ArduPilot's other sensors (GPS, mag, baro). Output rate is configurable from 200 Hz to 2 kHz over UART (default), with SPI and CAN available for board-level integrations. A standalone C library and a ROS 2 package expose the same protocol for non-ArduPilot stacks.

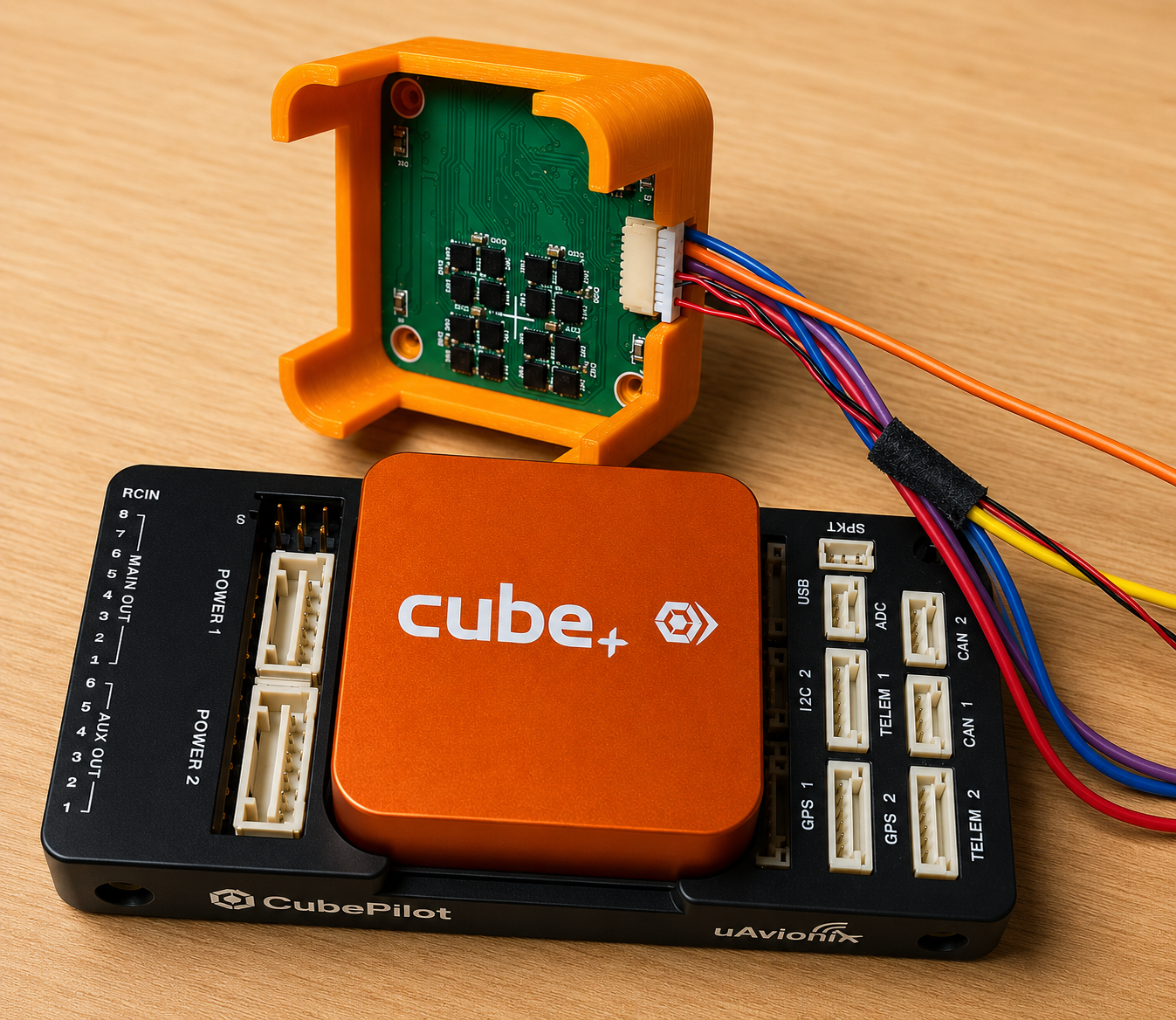

IMS-AI board + breakout adapter + USB-serial interface + SDK license. Includes calibration data and integration guide. Available for qualified defense integrators and R&D programs.